

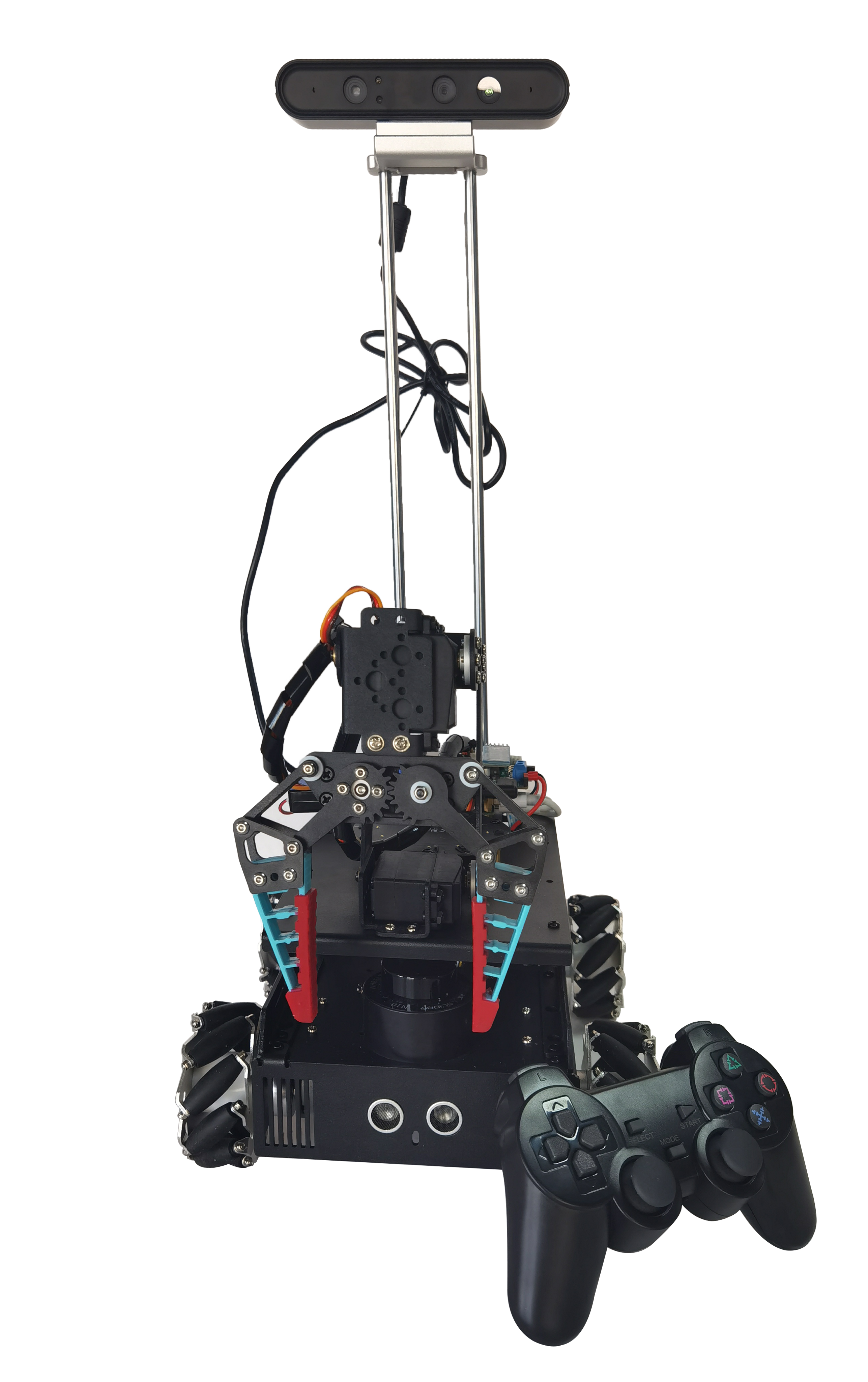


ZL-02C型AI机器人(rén)
AI机器人采用最新版本的树莓派4B平台和STM32运动控(kòng)制器框架,运算(suàn)能力和资源配(pèi)置大幅提高。可(kě)以(yǐ)进行嵌入式(shì)Linux系统以(yǐ)及ROS系统的实践与开发,能够驾驭处理速度要求较(jiào)高的应(yīng)用场景,如竞速小车(chē)、深度学习、机(jī)器(qì)视觉等,轻松验(yàn)证自动驾驶的各类控制算法。
根据智能车(chē)的控(kòng)制特点深度定制基于ARM Cortex-M3单片机的(de)底盘控制(zhì)器,将单片机大部分资(zī)源进行利(lì)用,可在此平台(tái)完成单片机相(xiàng)关课程的所有实(shí)验教学,同时能够进行Ubuntu18操(cāo)作系统的开发与教学。可实现声源定位、语(yǔ)音控制、语(yǔ)音交互、视觉跟随(suí)、雷达跟(gēn)随、地图构建、自主导航、视觉寻线、机械臂夹取、画面回传、实时传输影像资料、手柄控制、手机app控制等功能(néng),提供客户端库(kù)(Client Library)以支(zhī)持各(gè)种语言,目前已经(jīng)支持(chí)Python、C++、Java、Octave和LISP等多种语言(yán)进行(háng)深度(dù)学习和开发,是一套学习智(zhì)能机器人技术(shù)的最优(yōu)平台(tái)。
适用学(xué)校:高职院校、本科院校;
适用(yòng)专业:嵌入(rù)式技术应用、人工智能、人(rén)工智能技术应用、电子(zǐ)信息工程技(jì)术等(děng)专业;
适(shì)用课程:智能机器人(rén)传感技术、智能机器人控制技术、图像(xiàng)处理技术、语音处理技术、机器(qì)视觉、机(jī)器学习、人工智能(néng)技(jì)术应用导论、人工智能数理(lǐ)基(jī)础(chǔ)、人工智能技术开发框架、人工(gōng)智能数据采集(jí)处(chù)理、人工(gōng)智能应用实训等;
适用岗位:智能(néng)设(shè)备开发技术员、嵌入式程序开发程序员、嵌入式(shì)系统测试技术员(yuán)、嵌入(rù)式系统支持技术(shù)员、单片机开发工(gōng)程师。

